
Motores: Versão Final
Após apresentar o driver de motores da Texas Instruments, encontrámos limitações a nível da tensão de alimentação pois é demasiada para a nossa bateria. Caso optássemos por esta solução seriam ainda necessários todos os componentes do circuito bem como um dissipador de modo a garantir que o DRV8432 funcionasse correctamente.
Assim voltámos para o L298 da STMicroelectronics, um driver muito popular (bem como o L293 do mesmo fabricante mas com menor capacidade de corrente) que é capaz de controlar até dois motores (até 2A para cada) pois possui 2 pontes-H controladas por PWM. O circuito é bastante simples de projectar supondo os sinais de PWM gerados por um micro-controlador e encontram-se bastantes pela Net. O driver em si pode ser pedido como sample ao fabricante mas depois de uma pequena pesquisa no eBay encontrámos placas capazes de controlar até dois motores com o L298. Agora surge uma questão: se é mais económico adquirir um driver já montado ou se vala a pena realizar, numa PCB o circuito a partir dos diversos componentes adquiridos separadamente.
Optou-se então por encomendar, a um vendedor oriental (a um preço muito competitivo), o driver com base no L298 da ST. Passado cerca de um mês aqui estão:
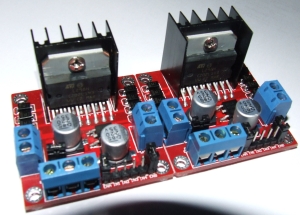
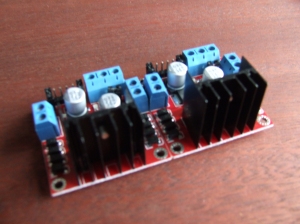
Foi já efectuado um pequeno teste apenas com tensões aplicadas aos pinos necessários para que fizesse actuar um motor DC e verificou-se que o veio do motor a rodar, como esperado.
O circuito é excelente para operar com o Arduino mas iremos usar um PIC (próximos posts). Temos dois para cada motor esperando assim poder distribuir a corrente necessária ao bom funcionamento dos motores já pensando na estrutura total do robo.
Nos próximos posts apresentaremos o micro-controlador que tratará de comandar a locomoção do robo, interagindo directamente com os drivers.
Cumprimentos,

Leave a comment